
The future of ROV piloting
It all began with a simple question: How can we make piloting more intuitive? We live in a three-dimensional world, so why are we settling for two-dimensional screens for piloting?
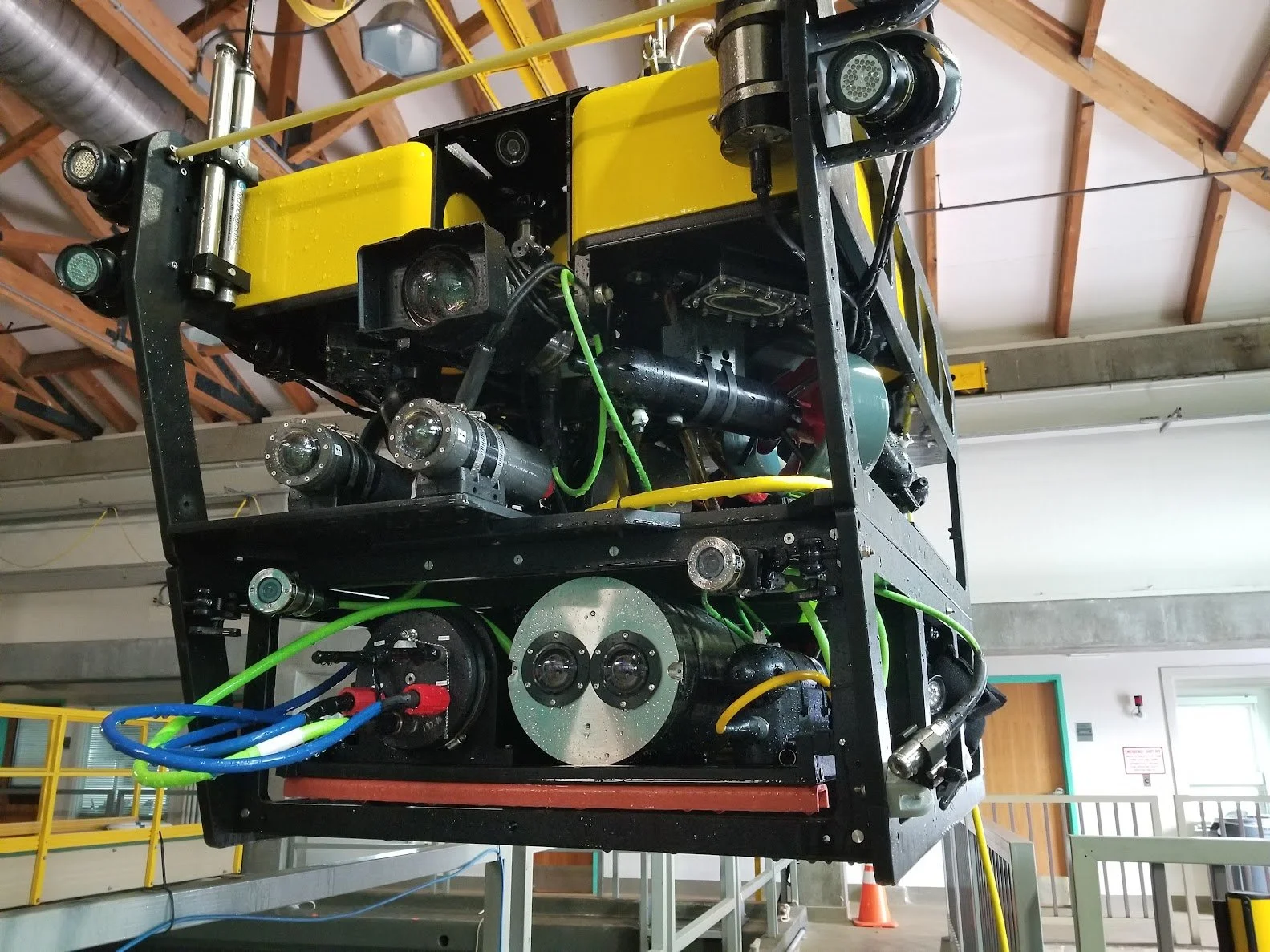
Stereoscopic Camera
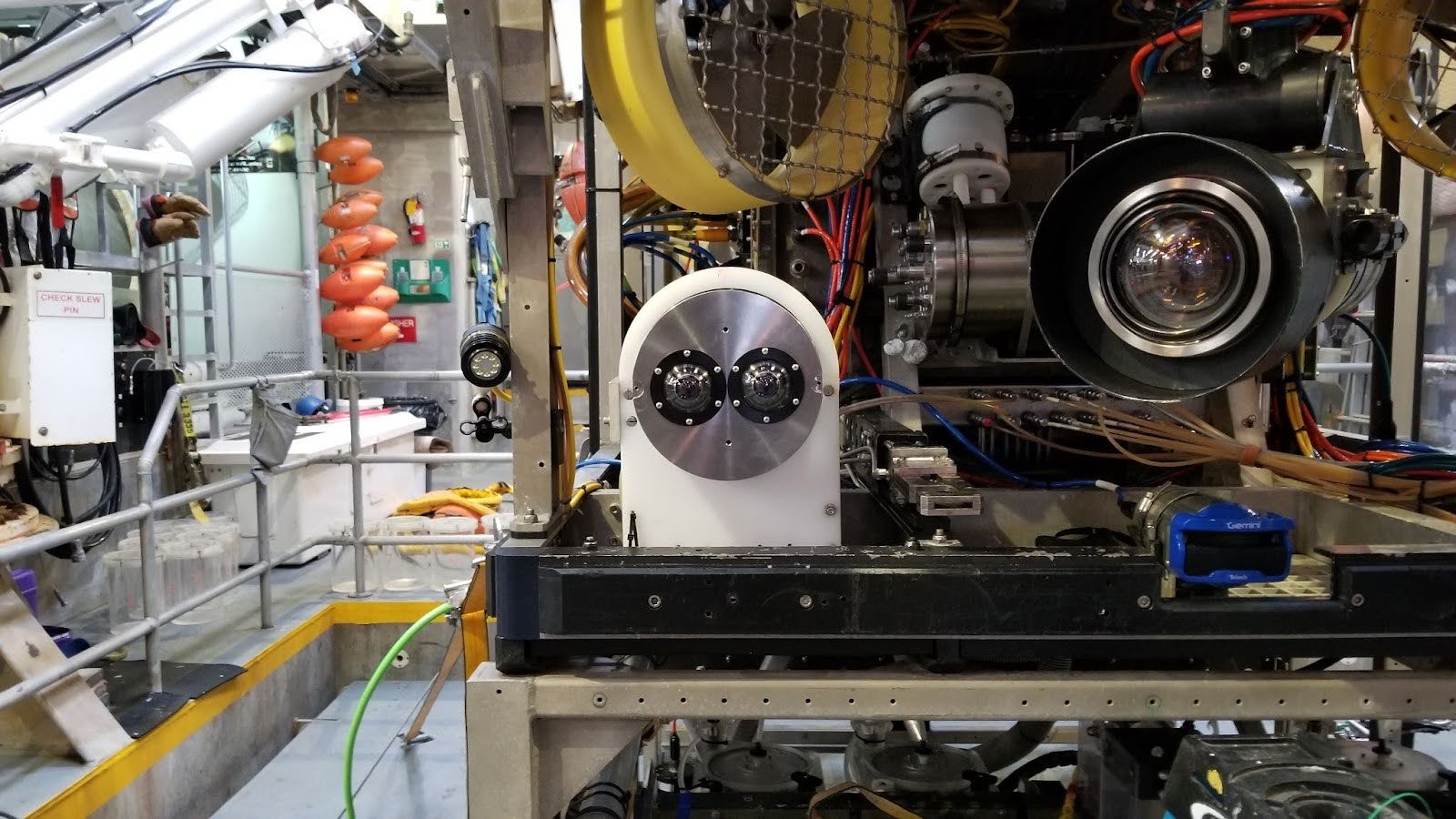
We've developed a cutting-edge, real-time panoramic 3D VR camera system that is a game-changer for underwater exploration. Depth-rated to 4,000 meters, this innovative camera provides an immersive, comprehensive view of the deep sea. It's designed to give ROV pilots enhanced spatial awareness and allow scientists to experience the environment as if they were there, making it an invaluable tool for both piloting and data collection.
Virtual Control Room
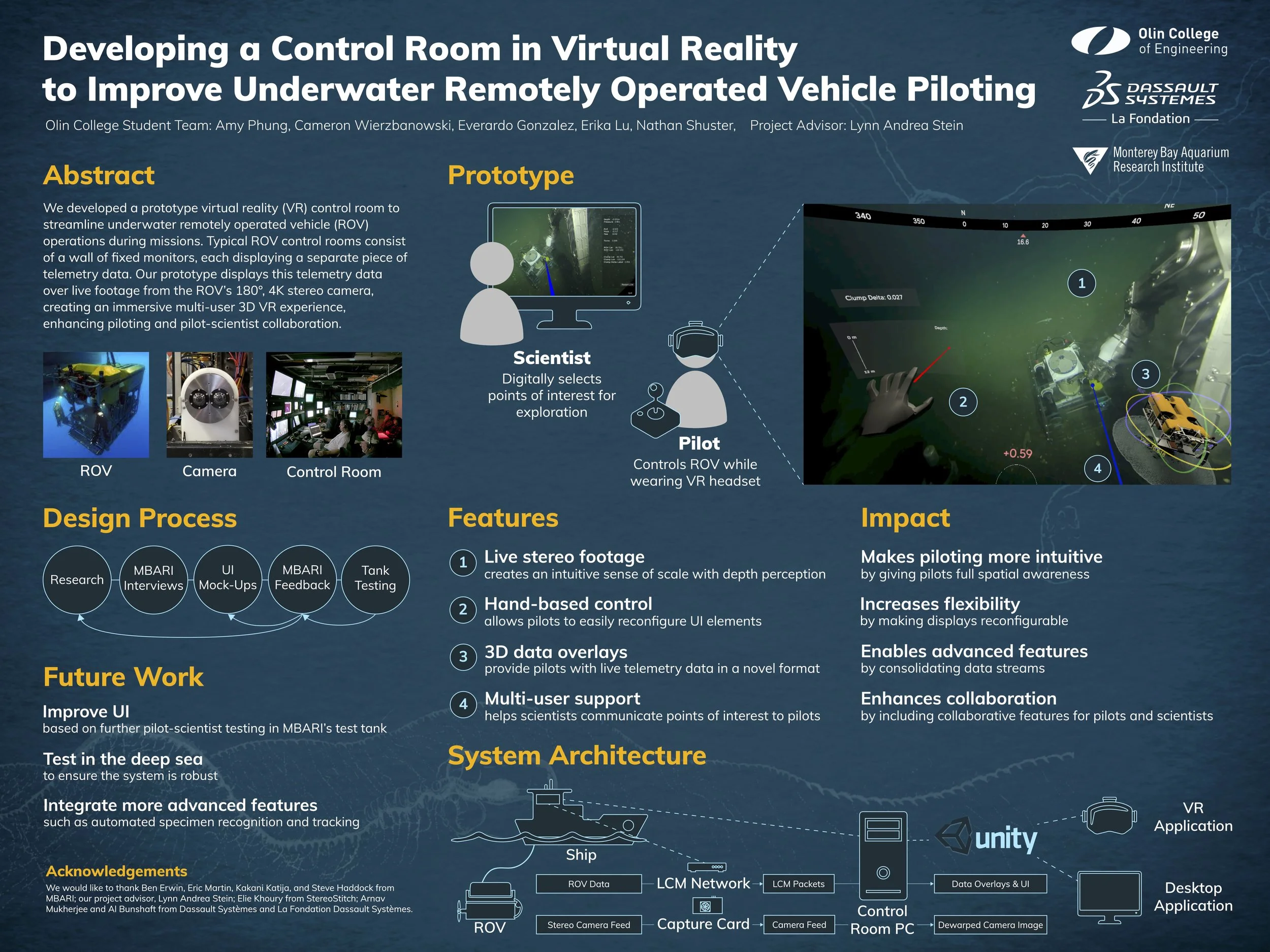
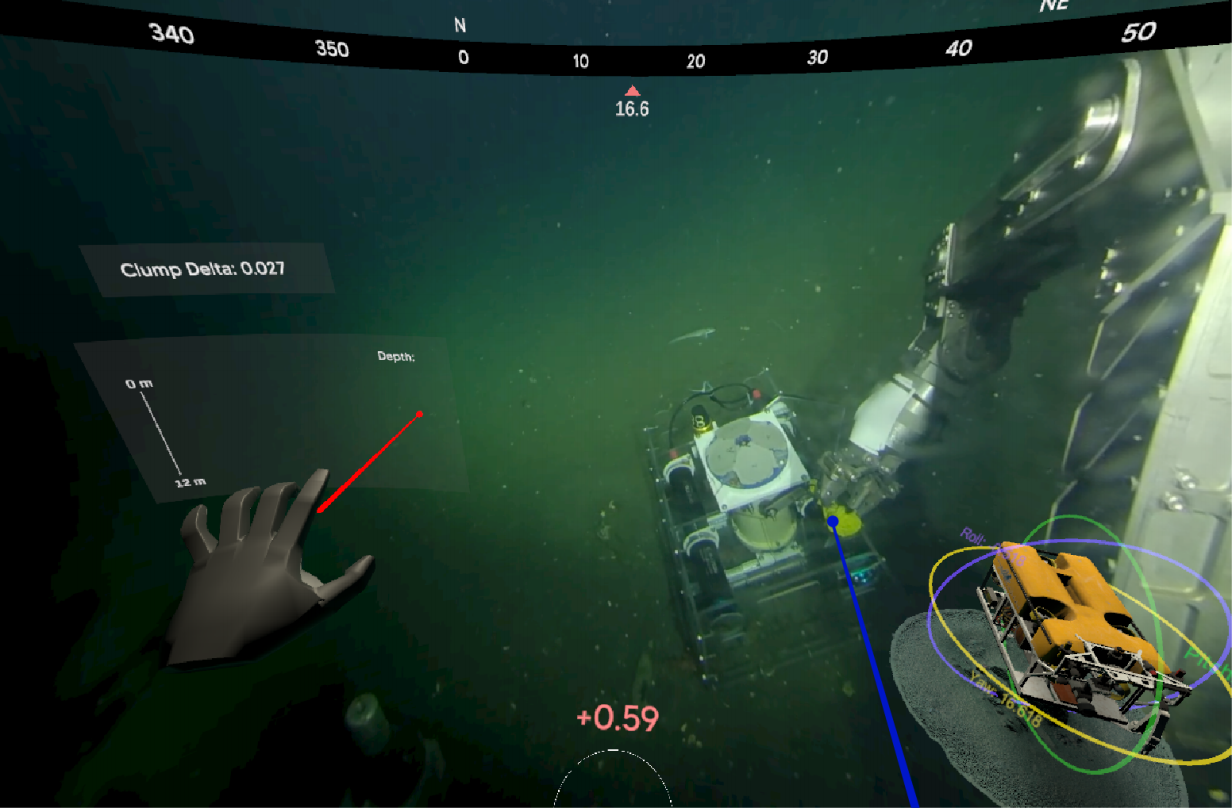
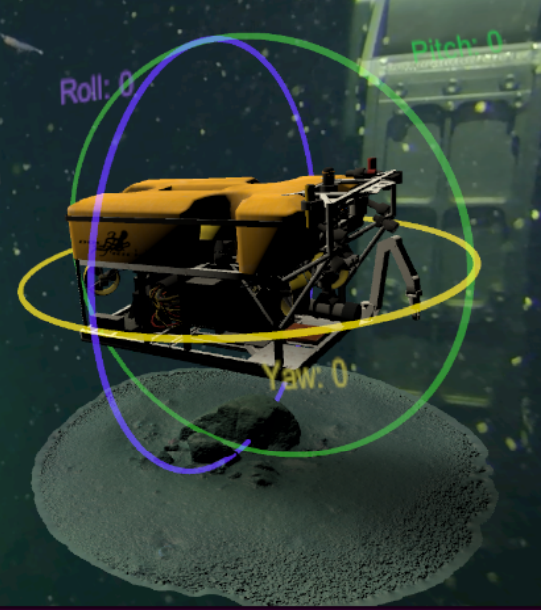
Immersive imagery is just the beginning. We pushed the boundaries by partnering with a team of students from the Olin College of Engineering to develop the world's first Virtual Control Room. This fully customizable system allows you to pull in data streams from vehicle and ship navigation, sonars, and more, all in one place, virtually right in front of you.
We make it easy to upgrade your existing system with advanced camera technology. Our expertise lies in seamlessly integrating stereoscopic and other specialized cameras into a wide range of platforms. The innovative stereoscopic camera and Virtual Control Room we developed can be easily adopted and transferred to your existing system, providing an immersive and intuitive piloting experience without the need for a full hardware overhaul. We're here to help you enhance your capabilities effortlessly.
Integration
Publications & Articles
Our VR system has been successfully deployed - including during the recovery of an ancient mammoth tusk - and has contributed to peer-reviewed research on the utility of VR in telerobotics.
-
Telepresence has always been a core aspect in the design and use of Remotely Operated Vehicles (ROVs) for deep-sea ocean exploration since they have replaced manned submersibles as the preeminent technology for deep sea research. Operators and users of these platforms require significant training to be able to navigate the environment through a multitude of sensors and two-dimensional video presentations. In this arrangement, conventional video cameras do not provide spatial context of study objects since they are flattened in presentation, limiting scientific observations. Display of these many video feeds also necessitates construction of large and costly control rooms, which in turn requires space on constrained vessels. Using multiple two-dimensional perspectives force operators to develop spatial relationships to perform manipulations. A new camera system has been developed at the Monterey Bay Aquarium Research Institute through a collaborative development with Blue Ring Engineering. It is deployed from an ROV, and designed specifically for generating video for virtual reality head-mounted displays. The resultant system facilitates collection of three-dimensional, 180° field-of-view stereo video delivered in real-time to the control room for science class ROVs. The imaging system, ROVVR, is a single 4000 m depth-rated housing with two 4K resolution cameras with fisheye lenses spaced at near-human interpupillary distance. As part of this effort, we have developed a Virtual Control Room (VCR), which presents the three-dimensional VR feed, with two-dimensional standard ROV video feeds as foreground panels, along with contextual data using augmented reality. Together, our software and hardware solutions can be used to improve vehicle piloting, reduce the time it takes for subsea manipulations, in-situ coarse size estimations, and improve portability of deployed systems.
-
Remotely Operated Vehicles (ROVs) are essential to human-operated underwater expeditions in the deep sea. However, piloting an ROV to safely interact with live ecosystems is an expensive and cognitively demanding task, requiring extensive maneuvering and situational awareness. Immersive Virtual Reality (VR) Head-Mounted Displays (HMDs) could address some of these challenges. This paper investigates how VR HMDs influence operator performance through a novel telepresence system for piloting ROVs in real-time. We present an empirical user study [N=12] that examines common midwater creature capture tasks, comparing Stereoscopic-VR, Monoscopic-VR, and Desktop teleoperation conditions. Our findings indicate that Stereoscopic-VR can outperform Monoscopic-VR and Desktop ROV capture tasks, effectively doubling the efficacy of operators. We also found significant differences in presence, task load, usability, intrinsic motivation, and cybersickness. Our research points to new opportunities towards VR with ROVs.
-